Motion compensation: accuracy
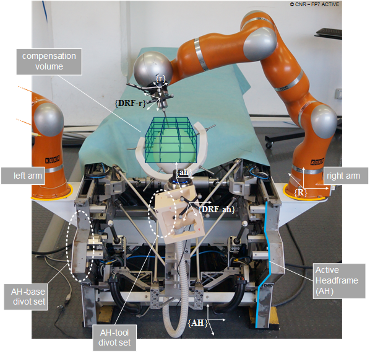
| ACTIVE multirobot platform is dedicated to the coordinated motion of the master Active Headframe (AH) and the 2 slave arms (KUKA LWR), without the help of external tracking sensors for closed-loop visual servoing. All functional features (e.g. navigation, Active Constraints and surgical tool manipulation) are rendered in the floating skull compensated reference. The end-to-end accuracy of the 3 robots platform is therefore crucial for the overall accomplishment of the haptics features as well as for the general tool targeting. |
|
|
| The multi-robot system has multiple sources of kinematical inaccuracies, i.e. intrinsic calibration of robots, robot-robot registration, tool calibration, skull registration, alignment with the navigation system in the MRI reference, etc. The regular end-to-end error for such registration chain is normally in the range of 15-20mm for the integrated equipment. |
|
|
|
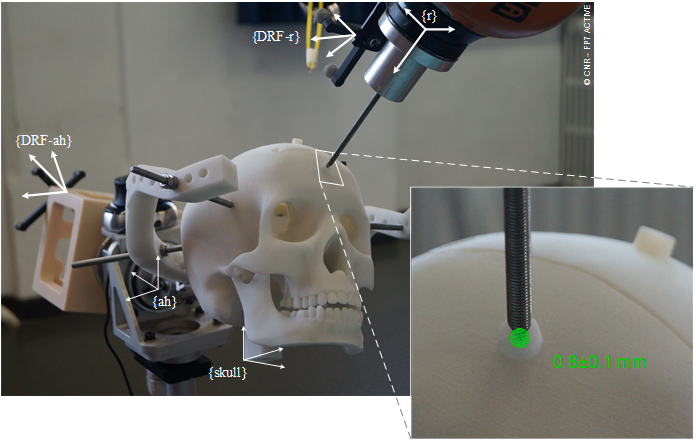
CNR group developed an error compensation procedure that corrects the motion of slave arm TCPs on target true locations, with the result of 0.8±0.1 mm end-to-end accuracy in the static case (1:22 error reduction factor). The procedure is performed offline, with the help of a ground-truth optical tracker, for the baseline compensation of the co-registration errors of the 3 coordinated robots. Errors are limited to an average 0.5mm/0.24deg, which is the performance of the general purpose robotic suite. Actual surgical tools and the positioning of a skull on the Active Headframe are defined intraoperative, introducing an additional 0.2-0.3mm to the end-to-end inaccuracy. |